Next: Parity Up: Dirac Equation Previous: Equivalence of a Two Contents
We will work with the Dirac equation and its transformation.
We know how the Lorentz vectors transform so we can derive a requirement on the spinor transformation.
(Remember that
 works in an entirely different space than do
works in an entirely different space than do
![]() and
and
![]() .)
.)
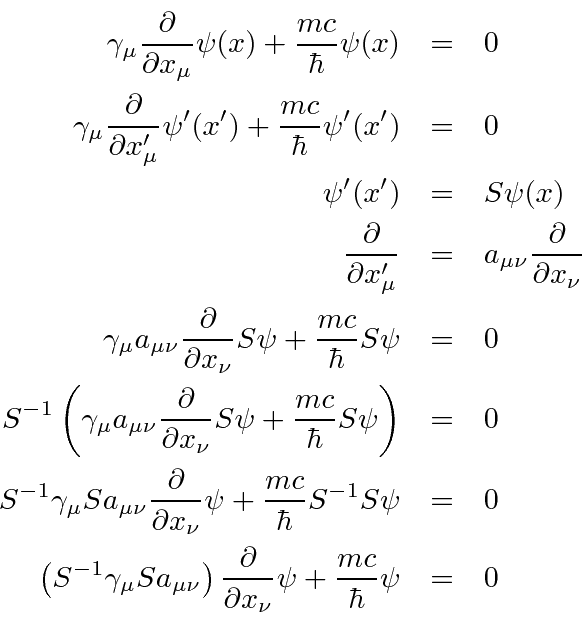
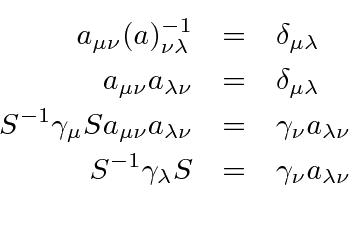
 .
Multiply by the inverse Lorentz transformation.
.
Multiply by the inverse Lorentz transformation.
 |
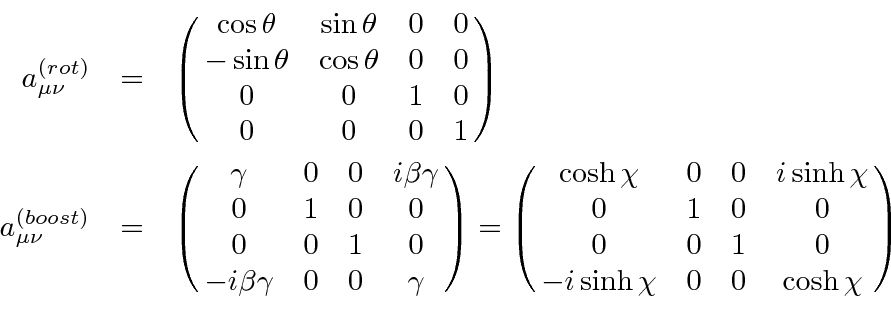
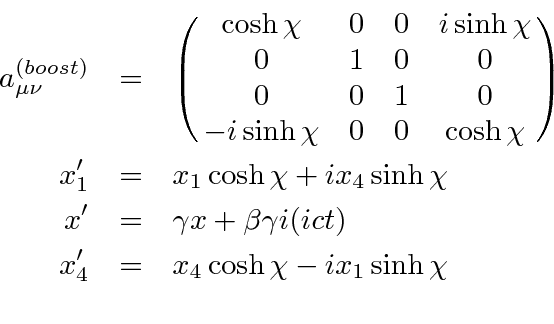
Rotations and boosts are symmetry transformations of the coordinates in 4 dimensions. Consider the cases of rotations about the z axis and boosts along the x direction, as examples.
 .
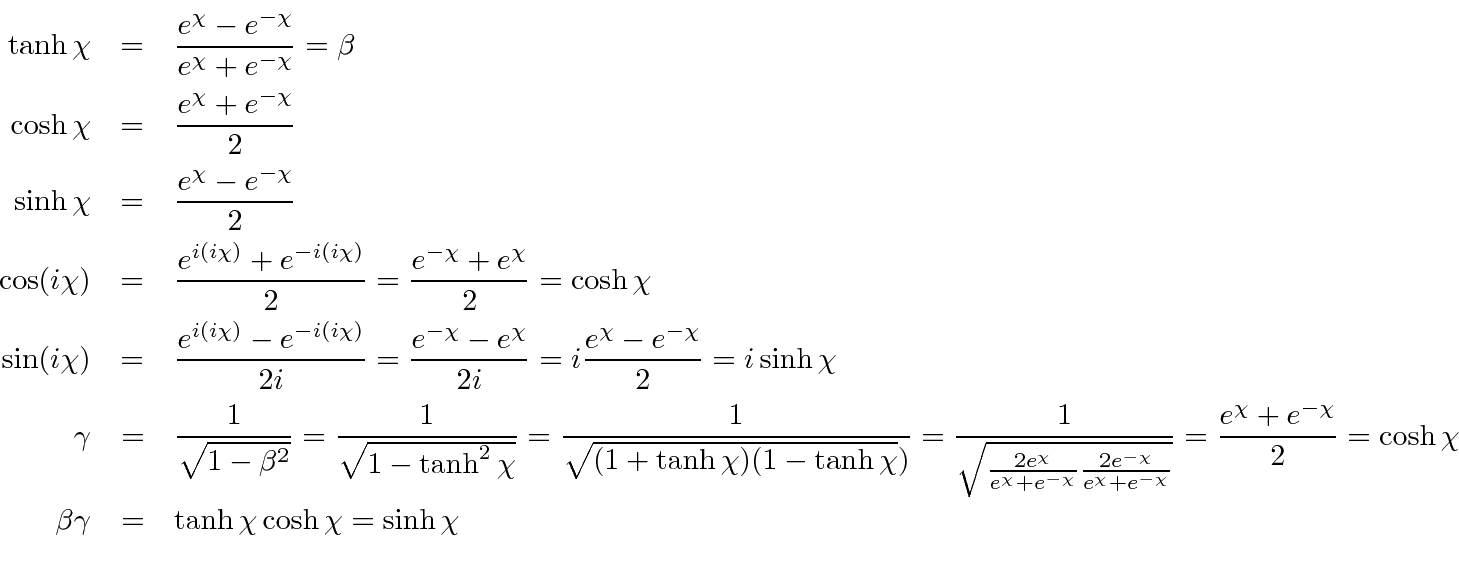
For example a boost with velocity
.
For example a boost with velocity
 .
.
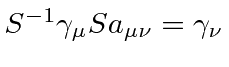
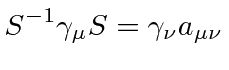
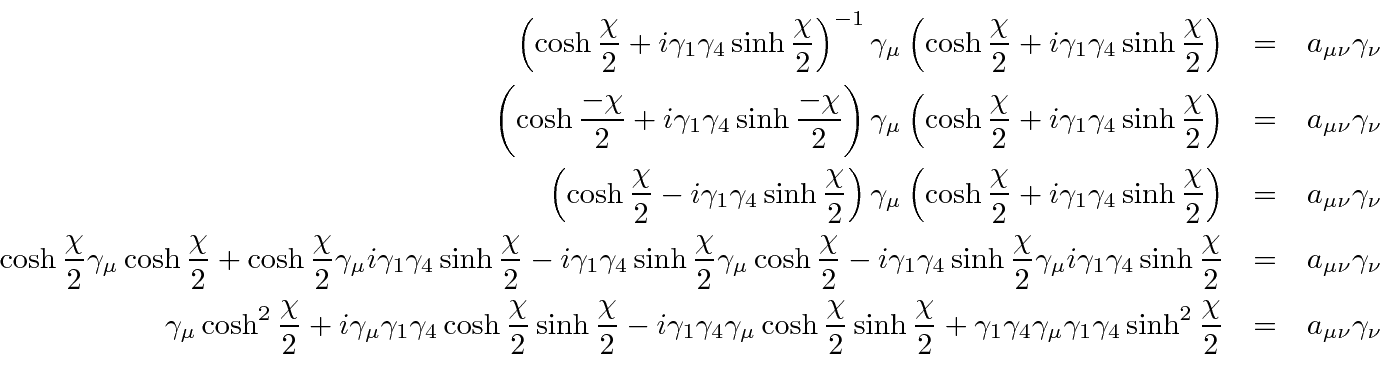
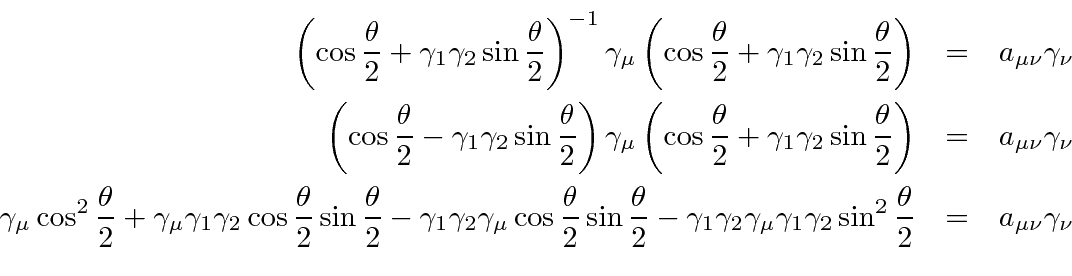
We need to find the transformation matrices
![]() that satisfy the equation
that satisfy the equation
 for the Dirac equation to be covariant.
Recalling that the 4 component equivalent of
for the Dirac equation to be covariant.
Recalling that the 4 component equivalent of
![]() is
is
![\bgroup\color{black}$\Sigma_z={[\gamma_1,\gamma_2]\over 2i}= {\gamma_1\gamma_2\over i}$\egroup](img4299.png) ,
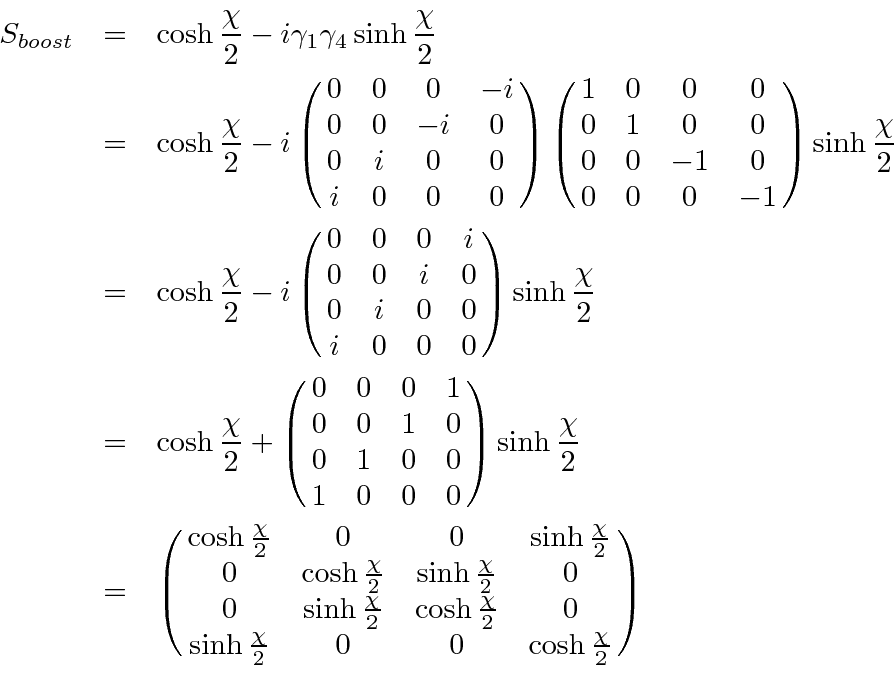
we will show that these matrices are (for a rotation in the xy plane and a boost in the x direction).
,
we will show that these matrices are (for a rotation in the xy plane and a boost in the x direction).
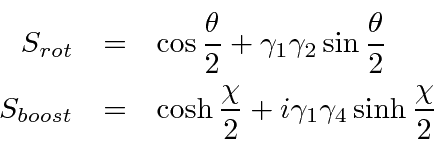
Lets verify that this choice works for a boost.
 ,
which tells us that the square of any gamma matrix is one and that commuting a pair of (unequal) matrices changes the sign.
,
which tells us that the square of any gamma matrix is one and that commuting a pair of (unequal) matrices changes the sign.

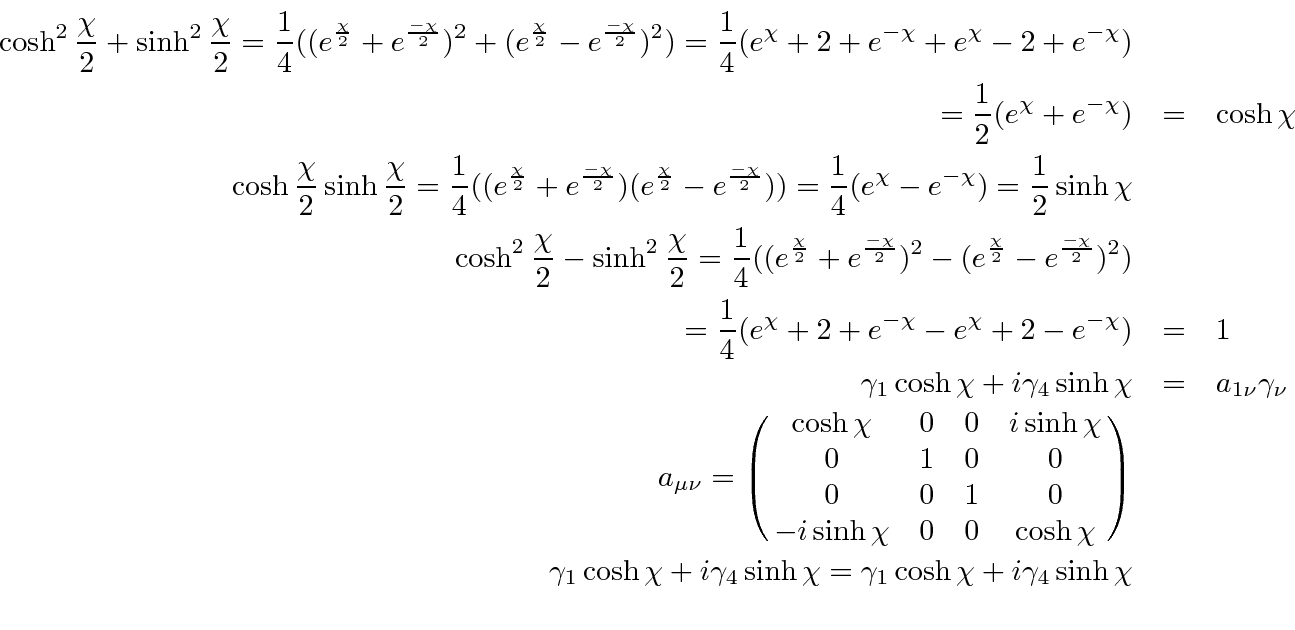


 with the matrix
with the matrix
 |
.
The pure rotation about the z axis should also be verified.
 or 4,
or 4,
 and the requirement is fairly obviously satisfied.
Checking the requirement for
and the requirement is fairly obviously satisfied.
Checking the requirement for
 , we get.
, we get.
 with the matrix
with the matrix
 |
 is a cyclic permutation.
is a cyclic permutation.
Despite the fact that we are using a vector of constant matrices,
![]() ,
the Dirac equation is covariant if we choose the right transformation of the spinors.
This allows us to move from one coordinate system to another.
,
the Dirac equation is covariant if we choose the right transformation of the spinors.
This allows us to move from one coordinate system to another.
As an example, we might try our solution for a free electron with spin up along the z axis at rest.


 direction with
direction with
 .
We can transform the momentum of the electron to the new frame.
.
We can transform the momentum of the electron to the new frame.

 .
We now have two ways to get the free particle state with momentum in the x direction.
We can use our free particle state
.
We now have two ways to get the free particle state with momentum in the x direction.
We can use our free particle state
 , defining this as the primed system.
, defining this as the primed system.
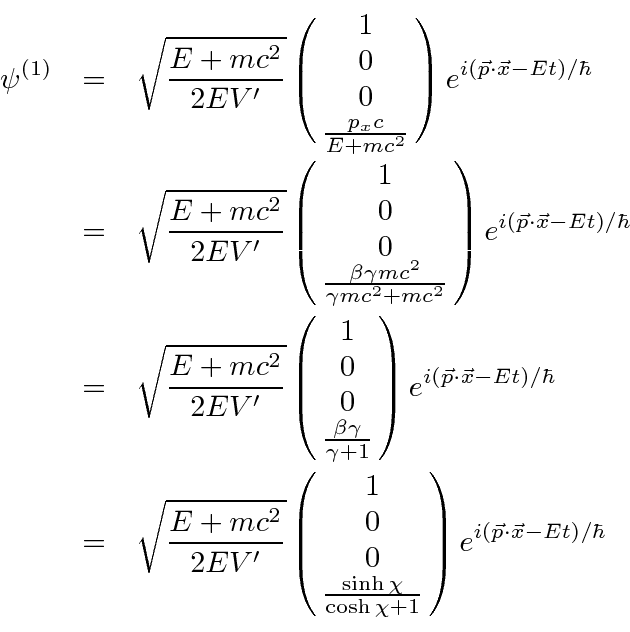
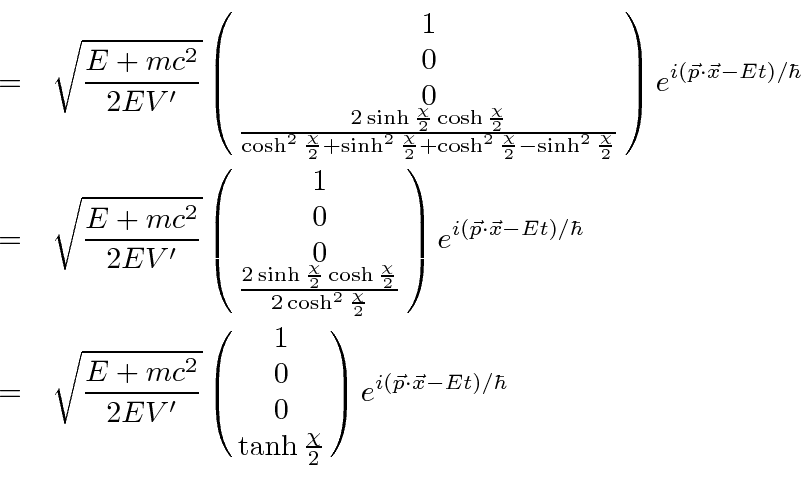
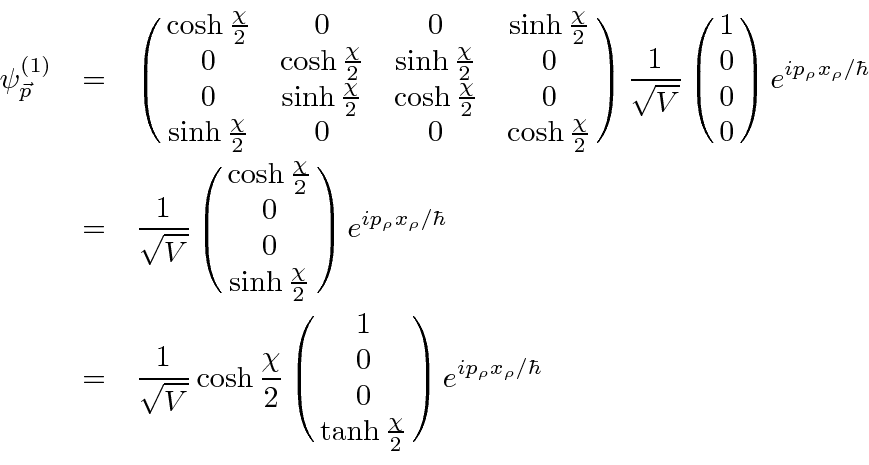
We can also find the same state by boosting the at rest solution.
Recall that we are boosting in the x direction with
 , implying
, implying
 .
.
 .
This boosted state matches the plane wave solution including the normalization.
.
This boosted state matches the plane wave solution including the normalization.
Jim Branson 2013-04-22